
Insects that can perform a flapping-wing flight, climb on a wall, and switch smoothly between the 2 locomotion regimes provide us with excellent biomimetic models. However, very few biomimetic robots can perform complex locomotion tasks that combine the 2 abilities of climbing and flying.
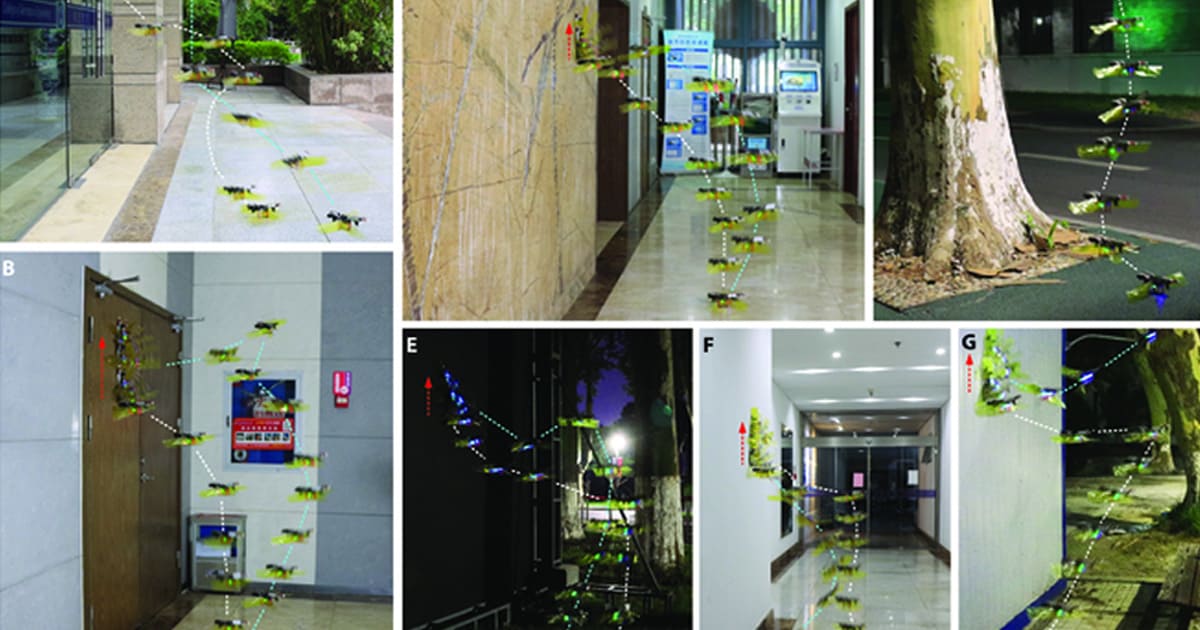
Here, we describe an aerial–wall amphibious robot that is self-contained for flying and climbing, and that can seamlessly move between the air and wall. It adopts a flapping/rotor hybrid power layout, which realizes not only efficient and controllable flight in the air but also attachment to, and climbing on, the vertical wall through a synergistic combination of the aerodynamic negative pressure adsorption of the rotor power and a climbing mechanism with bionic adhesion performance.
On the basis of the attachment mechanism of insect foot pads, the prepared biomimetic adhesive materials of the robot can be applied to various types of wall surfaces to achieve stable climbing. The longitudinal axis layout design of the rotor dynamics and control strategy realize a unique cross-domain movement during the flying–climbing transition, which has important implications in understanding the takeoff and landing of insects.
Moreover, it enables the robot to cross the air–wall boundary in 0.4 s (landing), and cross the wall–air boundary in 0.7 s (taking off). The aerial–wall amphibious robot expands the working space of traditional flying and climbing robots, which can pave the way for future robots that can perform autonomous visual monitoring, human search and rescue, and tracking tasks in complex air–wall environments.
Insects possess remarkable flying and climbing abilities after millions of years of evolution. Their complex flapping flight and versatile posture adjustments enable them to achieve high lift, agile flight, and precise movements. Insects exhibit different adhesion mechanisms on various surfaces, using claws for rough surfaces and smooth pads for smoother ones. Wall-climbing and aerial robots have been developed to mimic these abilities, with wall-climbing robots using claws or adhesive pads, and aerial robots achieving flight with flapping-wing mechanisms. However, each type of robot has limitations in terms of energy consumption, load capacity, and interaction with the environment. Aerial–wall amphibious robots, combining both aerial and wall-climbing capabilities, offer a solution to overcome these limitations. These robots can transition between climbing and flying modes, enabling them to reach challenging areas and adapt to various environments. The development of such cross-medium robots is a significant step towards achieving insect-like maneuverability and stability for various applications.
Discover the benefits and outcomes, along with additional in-depth information about this remarkable research, by clicking here.
Source: qian li, haoze li, huan shen, yangguang yu, haoran he, xincheng feng, yi sun, zhiyuan mao, guangming chen, zongjun tian, lida shen, xiangming zheng , and aihong ji